2011年12月23日
全没型歩行式浚渫ロボット

1976(昭和62)年に、かつて広島造船所の江波地区であった広島海洋機器工場で全没型歩行式浚渫ロボットが竣工した。
当時、システム技術部に居てその運転制御システムの開発を担当した。
浚渫工事は千差万別である。
底質は有機ヘドロから花崗岩の岩盤浚渫までさまざまな特性であり、水深や風波など稼働環境も広範にわたる。
従って従来の浚渫船で対処できず、そのプロジェクト向けの作業船が開発されることも珍しくない。
しかし、その多くは期待した性能を発揮できずスクラップされたり、他の用途に転用されることもしばしばである。
そのプロジェクトは外洋に面した発電所専用港湾で、風波、海流など海象条件も厳しいが水深が比較的浅いので従来の浚渫船では困難なものであった。
それで着底して昇降脚で歩行する浚渫ロボットを開発したのである。
陸上の運転室と光ファイバーでリンクし、浚渫作業は遠隔制御することにした。
従来の浚渫船の操縦室で運転する感覚で、ポンプ出力、負圧、流量などを指標に運転することにしたが、歩行機構は全く新規開発で一人の運転員で遠隔制御は難しいため歩行は前後左右や方向転換も含め、自動制御することになった。
本体の重量も専用港湾のクレーンで取り扱える範囲に収めることが求められた。
本体が完成したあと、陸上および浮揚状態、全没状態で立会試験を完了し、発注者に引き渡すことが出来た。
世界最初の全没型浚渫ロボットは現地でも順調に作動していた。
この運転制御システムの開発を学位論文としてとりまとめていたが、公聴会などの日程が決まった頃、指導を仰いでいた教授が体調を崩し、そのままとなっている。
もう、随分以前のことで忘れていたが、最近、偶然に2号機が作られ、稼働していたことを知った。
開発から10年以上経っていた。
この種の新規開発にしては稼働実績が評価されたのであろう。
広報資料に載っていた写真は開発したものとよく似ている。
その後10年間のシステム技術の伸展は著しいから運転制御システムはすっかり更新されたものと思うが開発に携わった者としては嬉しいことである。
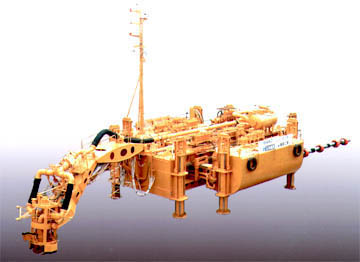
これが資料に載っていた1999年3月竣工の後継機である。
「ふたば2号」と言うらしい。
"全没型歩行式浚渫ロボット"へのコメントはまだありません。