2006年09月14日
*** 当ブログは2014年5月末に引っ越しました…新しい「紺碧の海」はこちらです ***
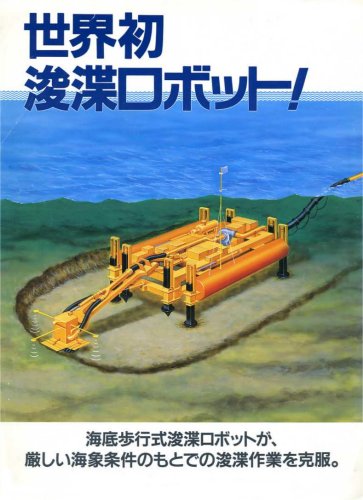
(生い立ちの記:32) 水中歩行式浚渫ロボットの開発(1)
「浚渫運転支援装置」の開発から約10年後、重要な港湾で年次浚渫工事が必要になった。
その専用港湾は海面が狭く浅いので在来型の浚渫船で施工するにはあまりにも条件が厳しかった。
狭いためスイングアンカーを打つことも出来ず、大型プラントの大量の冷却水が吐き出されるのでその流れにより海底に局部的な起伏が多いために在来のポンプ船では施工が難しいところであった。
常時大量の冷却水が吐出されているので放置しておくとそのプラントの運転に必要な船舶が入出港出来なくなる恐れがあった。
幸い、必要な浚渫量は臨海工業地帯の埋め立て工事ほど多くはないので小型の浚渫機を開発することになった。
小型浚渫船にはグラブ式やバケット式もあるが、専用港湾に入出港する船舶の航路を維持するために一定の水深を確保するため浚渫精度も要求されていたので基本計画でカッターサクション方式でスイングしつつ浚渫する方式が選定された。
浚渫機の本体も水面に浮かぶバージ式・無限軌道による海底歩行式などが検討されたが複数の脚を昇降する歩行式に決まった。
バージ式では全体規模が大きくなり専用港湾のクレーンの能力を超過し、無限軌道方式では陥没や岩石など海底の状況によって制御不可能に陥る可能性もあったからである。
開発中に様々な実験や解析を行い、初期計画から幾多の変遷があったが最終的にはイラストの概念図に近いものが出来上がった。
構造強度・油圧システム・シーケンサなど電装・光ファイバー・電力ケーブルなど造船所/メーカー各社の総合力を結集した成果であると考えている。
このシステムで歩行制御システムの開発を担当した。
良い経験になった工事であった。
イラストは造船所で製作したPR資料である。
"(生い立ちの記:32) 水中歩行式浚渫ロボットの開発(1)"へのコメントはまだありません。