2006年09月18日
(生い立ちの記:33) 水中歩行式浚渫ロボットの開発(2)
その浚渫ロボットの要求仕様はなかなか厳しいものであった。
先ず、稼働海面の海象条件であるが、最大風速は待機状態で36m/秒、稼働中は18m/秒と設定された。
海水の流速は大型プラントの冷却水が吐出されるので局部最大で0.9m/秒もあるという。
最大波高は待機状態で2.8m、稼働中も2mの波高に耐える必要がある。
そのほか波周期や潮位なども条件が設定された。
次に底質であるがこれも容易ではなかった。
湾口は砂質土(N値20〜30)、湾奥部では堆積したシルトである。
現地は港湾建設やそのための浚渫工事などで起伏が大きく、最大傾斜は6度と設定された。
しかも、溝や孔があるも知れず、岩石が投棄されている可能性もあるという。
このほか、水深(最深部/最浅部/浚渫計画水深)土質、シルト層厚なども与えられた。
その海面を精度良く一定の効率で連続浚渫するシステムの開発が求められたのである。
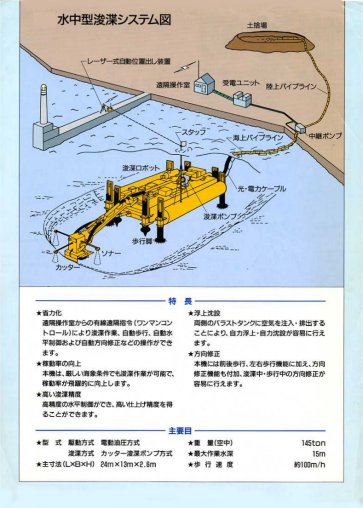
浚渫施工工法にはグラブ浚渫・バケット浚渫・ディッパー浚渫など様々な方式があり、施工海域や浚渫目的により使い分けられているが浚渫方式は浚渫ポンプによるカッターサクション方式が選定された。
連続浚渫が行えることと、浚渫施工精度がこの方式の長所である。
浚渫精度に関しては、地球を機械加工するする必要はないのであるが竣工検査で目標の深度に達していないところがあると浚渫のやり直しをしなければならないし、目標深度より深く浚渫しても全くの無駄になるから浚渫会社は常に施工精度を上げるために腐心している。
専用港湾は狭いので在来型浚渫船では操船困難が予想された。
従って本体の一部を水面上に出してその上で人間が運転する方式も検討されたが陸岸から離れた海面上での操業には問題が多く様々な支援が必要になる。
それで浚渫機を全没させて陸岸から操作する浚渫ロボットのアイデアが提案された。
全没型にしても移動方式は多い。
無限軌道式、車輪による方式、関節脚方式なども考えられるが安定性・信頼性・効率などの点から昇降脚による歩行式が採用されることになった。
全体の大きさと重量も大きな制約条件となった。
専用港湾の起重機の能力が150トンなのでその範囲でまとめねばならない。
脚のストローク、土質を考慮した沓の形状、陸上からの遠隔監視・制御システムの開発など問題は山積していた。
これらを勘案しながら基本計画のイメージが出来上がっていった。
"(生い立ちの記:33) 水中歩行式浚渫ロボットの開発(2)"へのコメントはまだありません。